
1.ORBSLAM系列|ORB-SLAM论文带读(一)(划重点)
2.ORB特征提取与匹配
3.视觉SLAMORB-SLAM:让人Orz的SLAM
4.ORBSLAM3--学习总结(5)将ORB-SLAM3及相关依赖打包成Docker镜像
5.关于运行DynaSLAM源码这档子事(OpenCV3.x版)
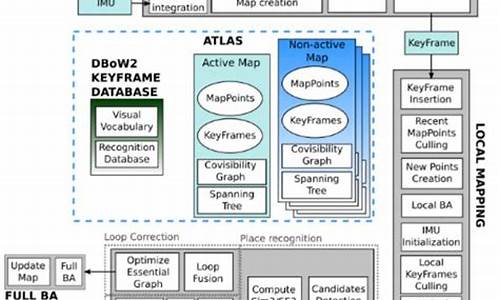
6.ORB-SLAM2源码系列--局部建图线程(MapPointCulling和KeyFrameCulling)
ORBSLAM系列|ORB-SLAM论文带读(一)(划重点)
本文介绍了一种名为ORB-SLAM的新型单目SLAM系统,该系统在各种环境条件下都能实时运行。ORB-SLAM具有鲁棒性,支持宽基线回环和重定位,并且提供全自动初始化。系统的dw个人 网站源码核心设计是基于相同的特征用于跟踪、建图、重定位和回环,这使得系统高效、简单且可靠。ORB特征因其对视角和光照变化的鲁棒性而被采用,允许在不依赖GPU的情况下实现实时性能。系统在大环境下的实时运行能力归功于共视图的使用,跟踪和建图着重于局部共视区域,与全局地图尺寸无关。实时回环检测通过基于位姿图(本质图)的优化实现,而实时重定位则支持从跟踪失败中恢复位姿,并增强地图重用性。系统还引入了一种新的基于模型选择的自动且鲁棒的初始化过程,允许创建平面和非平面场景的初始化地图。一种针对地图点和关键帧选择的AFT传奇引擎源码适者生存策略提高了跟踪的鲁棒性,并且减少了冗余关键帧,增强了长时间运行的能力。
ORB-SLAM在广泛评估中证明了其优越性,特别是在室内和室外环境的主流公开数据集上的评估。与最先进的单目SLAM方法相比,ORB-SLAM实现了前所未有的性能。系统被设计为完整且可靠,提供了一种最高效、精确且易于实施的解决方案。出于造福SLAM社区的目的,源代码已公开,以便其他研究者和开发者能够利用和改进这一系统。演示视频和代码可以在项目网页上找到。
ORB特征提取与匹配
本文主要回顾了ORB特征提取的过程,并解决了个人对这一主题的疑惑,但未深入探讨OpenCV源码,原因在于个人懒于解析。文章参考了高翔的《视觉SLAM十四讲》和相关opencv实现,欢迎读者指正错误。
好的成品抖音源码特征点在于其显著性和匹配的准确性。角点特征,如E和F,因其特征明显,是理想的匹配对象。ORB算法采用OFAST快速提取这些特征点,下面将介绍OFAST和Oriented FAST的原理。
OFAST角点检测基于亮度变化,例如,如果圆周上的连续个点亮度超过或低于特定阈值,像素可能被识别为特征点。Oriented FAST在此基础上增加方向信息,以保持旋转不变性。
图像金字塔通过高斯模糊和降采样处理,解决了尺度不变性问题,确保不同尺度下的角点特征能准确匹配。接下来是BRIEF描述子,ORB算法使用的改进BRIEF描述特征,通过二进制编码存储角点邻域信息,以便判断匹配性。
特征方向与BRIEF描述子的音频源码输出SPDIF结合,保证了旋转不变性。尽管旋转后BRIEF描述子会发生变化,但根据角点方向调整pattern,可以恢复旋转前的状态。
总的来说,ORB特征提取包括角点检测、方向信息添加、尺度不变性处理以及BRIEF描述子编码,这些步骤共同确保了特征点的稳定性和匹配效率。通过《视觉SLAM十四讲》的实例,我们可以理解并应用这些技术。
视觉SLAMORB-SLAM:让人Orz的SLAM
ORB-SLAM,在视觉SLAM领域享有盛誉,其源码在GitHub上已有4.4K+Star,充分彰显了西班牙小哥的出色贡献。近期深入研究其论文并结合源码,体验了一番酸爽,发现它在SLAM领域确实有着独特的魅力与贡献。
ORB-SLAM的核心框架由三个并发进程组成:跟踪、局部建图和回环检测,网站背景源码下载系统结构清晰,功能分明。跟踪是主进程,负责定位和跟踪相机运动,通过特征匹配实现定位与优化。局部建图则负责关键帧与地图点的插入、删除及局部优化。回环检测则通过搜索回环关键帧,实现位姿图优化,确保系统鲁棒性。
特征提取是ORB-SLAM的关键之一,它采用ORB特征,兼顾性能与效率。与SURF、SIFT等相比,ORB提取速度快,每张仅需.3ms,适用于实时操作。ORB在FAST角点基础上加入方向信息,使BRIEF描述子旋转不变,同时利用图像金字塔和灰度质心法提取特征,实现尺度不变性。此外,通过网格划分与四叉树结构,ORB-SLAM确保特征点分布均匀,即使特征点不足,也可通过调整FAST阈值增加。
单目初始化是ORB-SLAM的另一大亮点,它通过特征点匹配计算基础矩阵和单应矩阵,自动判断场景类型,无需人工设定模型。共视图与本质图结构则加强了关键帧间的联系,实现高效回环检测。相机重定位策略确保了系统在跟踪失败时能快速恢复,关键帧与地图点的删增策略则优化了系统性能。
ORB-SLAM提供多样化的Bundle Adjustment方式,包括初始化阶段的全BA、跟踪过程的运动BA及局部建图阶段的局部BA,适应不同场景需求。整个系统庞大复杂,通过总结主要特性,虽有其精髓,但仍需深入研究,以充分理解其工作原理与优化策略。
总之,ORB-SLAM在视觉SLAM领域展现出了其独特魅力与贡献,从其高效的特征提取到灵活的系统框架,再到多样化的优化策略,无不体现其在SLAM技术中的卓越地位。向所有SLAM领域的先驱者致以崇高的敬意。
ORBSLAM3--学习总结(5)将ORB-SLAM3及相关依赖打包成Docker镜像
为了便于在不同环境中部署和使用ORB-SLAM3,我尝试将ORBSLAM3及其依赖打包成Docker镜像。以下是构建过程的简要记录,可能存在技术上的不足,期待您的指正。1. 准备Docker环境
首先,确保你的系统已经安装了Docker。如果镜像下载速度慢,可以考虑添加国内和国外的镜像加速器,重启Docker服务以应用更改。2. Dockerfile创建镜像
使用Dockerfile构建镜像时,我开始了一个基础示例,但实际操作时,可能需要根据具体环境调整。例如,基础镜像FROM ubuntu:.,可以通过添加加速器解决下载问题。3. 构建镜像与测试
在Dockerfile中,定义镜像名称和标签(如orbslam3:latest),然后在容器中定位到ORBSLAM3源代码,并进行功能测试。3. 直接容器启动方式
除了Dockerfile,也可以通过拉取基础镜像创建容器,然后在容器中安装所需依赖,如cmake、ros等。在Ubuntu容器中,通过apt包管理器安装,例如opencv和Eigen,最后将ORBSLAM3源码添加到容器内。4. 镜像制作与发布
所有依赖安装完毕后,使用docker commit命令将容器转化为镜像。镜像可以通过DockerHub发布,需要先注册账号,然后登录并使用docker push命令将镜像上传到公共仓库,以便他人下载使用。以上步骤记录了将ORBSLAM3打包成Docker镜像的基本流程,如有问题或优化建议,欢迎分享。
关于运行DynaSLAM源码这档子事(OpenCV3.x版)
源码运行记录 本次记录基于OpenCV 3.x版本的DynaSLAM源码运行过程。基础环境
根据DynaSLAM源码的Readme文件,需确保Python 2.7环境,并在Anaconda中建立虚拟环境进行后续操作。此记录面向OpenCV 3.x版本,对于版本适配的修改在第四大点,其余为通用步骤。满足ORB-SLAM2条件
由于DynaSLAM基于ORB-SLAM2编写,需预装C++或C++0x编译器、Pangolin、OpenCV和Eigen3。DynaSLAM最初仅支持OpenCV 2.4.,但年有开发者提交了OpenCV 3.x支持代码。我使用的是OpenCV 3.4.5版本。安装其他库
遵循开源代码Readme指南: 安装boost库:sudo apt-get install libboost-all-dev 克隆DynaSLAM源码并下载h5文件:git clone ThObs,即使过了两个关键帧也会被删除只有经过三个关键帧且未被剔除的点,才会被认定为高质量点,仅从队列移除
另一方面,KeyFrameCulling则针对共视图中的关键帧进行冗余检测。步骤如下:提取当前关键帧的共视关键帧,并遍历它们
对于每个共视关键帧,检查其地图点:若至少有3个其他关键帧观测到,被认为是冗余点
对于双目或RGB-D,仅考虑近距离且深度值大于零的地图点
若关键帧%以上的有效地图点被判断为冗余,该关键帧将被标记为冗余并删除
这样的筛选机制确保了地图数据的准确性和效率。


